無人機智能巡檢系統 人工智能基礎軟件開發的產品原型設計
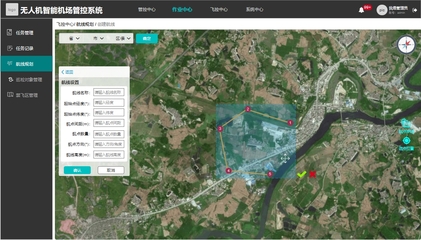
隨著人工智能技術的飛速發展和工業自動化需求的日益增長,無人機智能巡檢系統正逐步成為能源、交通、安防、農業等眾多領域的關鍵基礎設施。本產品原型聚焦于該系統的核心——人工智能基礎軟件開發,旨在構建一個高效、精準、可擴展的智能感知與決策平臺。
一、 核心功能模塊設計
- 智能感知與數據采集模塊:
- 視覺感知:集成高精度攝像頭與紅外熱成像儀,開發基于深度學習的圖像識別算法,用于自動識別設備缺陷(如電力線路的絕緣子破損、螺栓缺失)、異常發熱點、結構裂縫等。
- 環境感知:結合激光雷達(LiDAR)與多光譜傳感器,開發點云處理與語義分割算法,實現三維場景重建、植被侵限分析、地形地貌變化監測。
- 自主路徑規劃與避障:開發融合實時環境感知信息的動態路徑規劃算法,確保無人機在復雜環境中安全、高效地完成預設或自適應巡檢航線。
- 邊緣計算與實時分析模塊:
- 模型輕量化與部署:將訓練好的大型AI模型進行壓縮與優化,部署于無人機機載邊緣計算單元,實現巡檢數據的實時就地分析,大幅降低對通信帶寬的依賴和響應延遲。
- 異常實時預警:開發流式數據處理管道,對識別出的異常目標進行即時分類、定位與嚴重性評估,并通過數據鏈向地面站發送分級告警信息。
- 云端智能管理與分析平臺:
- 數據匯聚與資產管理:建立統一的云端數據庫,存儲所有歷史巡檢數據(圖像、視頻、點云、日志),并與被巡檢的物理資產(如鐵塔、風機、管道)數字孿生模型關聯。
- 模型持續訓練與優化:構建云端AI訓練平臺,利用不斷積累的標注數據,對識別模型進行迭代優化與增量學習,提升系統的準確性與泛化能力。
- 宏觀分析與決策支持:開發數據分析工具與可視化儀表盤,對全區域、長周期的巡檢數據進行趨勢分析、健康度評估和預測性維護建議生成。
二、 關鍵技術實現
- 算法選型與開發:
- 目標檢測:采用YOLO系列、Faster R-CNN等先進算法進行缺陷與異常目標檢測。
- 圖像分割:運用U-Net、DeepLab等架構進行精細的像素級分割,用于裂縫測量、銹蝕區域量化。
- 點云處理:利用PointNet++、RandLA-Net等網絡處理三維激光點云數據,實現自動分類與變化檢測。
- 多模態融合:研究視覺、紅外、激光雷達數據的融合算法,提升復雜場景下的感知魯棒性。
- 軟件架構設計:
- 采用微服務架構,將感知、規劃、分析等服務解耦,提高系統的可維護性與可擴展性。
- 設計標準化的數據接口與通信協議,確保機載端、通信鏈路與云端平臺之間的數據流暢交互。
- 引入容器化技術(如Docker)與編排工具(如Kubernetes),實現AI模型與服務的敏捷部署與管理。
三、 產品原型驗證與迭代
- 仿真測試環境:構建高保真的數字孿生仿真環境,在虛擬場景中大量測試無人機的自主飛行邏輯與AI算法的識別性能,加速開發周期并降低初期實地測試成本與風險。
- 小范圍實地試點:選擇典型的應用場景(如光伏電站、輸電線塔),部署原型系統進行實地飛行測試,收集真實環境下的算法性能數據與系統運行反饋。
- 閉環迭代優化:基于仿真與試點數據,形成“數據采集->模型訓練->算法更新->部署驗證”的快速迭代閉環,持續提升產品原型的成熟度與實用性。
四、 與展望
本產品原型通過系統性地整合計算機視覺、深度學習、邊緣計算與云計算等人工智能基礎軟件技術,為無人機智能巡檢構建了一個從實時感知到深度分析的完整技術棧。其成功開發將顯著提升巡檢作業的自動化水平、精準度和效率,降低人工成本與安全風險。隨著算法的進一步精進和5G等通信技術的融合,該系統將向全自主化、協同化與預測性智能運維的更高階段演進,成為工業物聯網與智慧城市不可或缺的空中智能節點。
最新產品

從報告到落地 解讀《2024年人工智能準備度報告》對AI基礎軟件開發的啟示
人工智能新風口 2019年最吃香的幾大專業,基礎軟件開發領跑

AI設備滲透加速 2024年工業制造業總安裝基礎達1540萬臺

2019年人工智能發展白皮書 人工智能基礎軟件的發展與挑戰
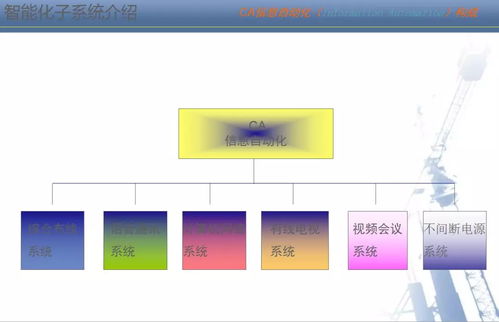
智能化弱電系統與人工智能基礎軟件開發進階訓練

人工智能學習 掌握基礎軟件開發的核心知識
無人機智能巡檢系統 人工智能基礎軟件開發的產品原型設計

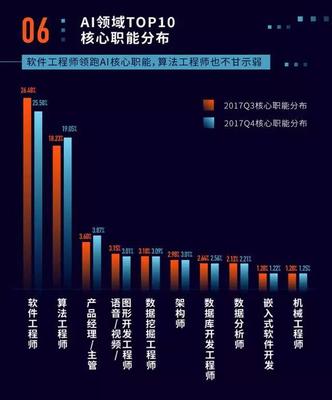
2017全球人工智能發展報告·產業篇 人工智能基礎軟件開發的格局、挑戰與趨勢
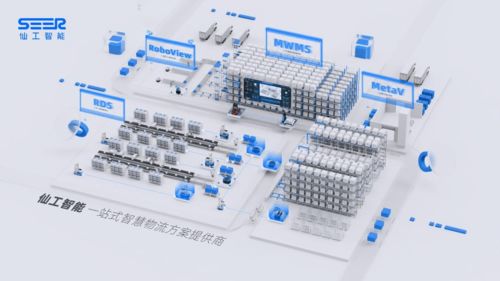
仙工智能獲數億元B輪融資,以標準化產品加速非標方案構建進程
中科院發布2019全球AI全景圖 中國力量崛起,關鍵技術驅動產業深化